數字電液控制系統(Digital Electric-Hydraulic Control System,DEH)是保證汽輪機經濟運行必不可少的條件。汽輪機DEH的任務是根據控制指令(目標轉速、負荷及其變化率),控制運行方式、閥門試驗方式、機組狀態參數和轉速、發電機功率等被控量,通過數字控制器輸出控制信號,經與反饋信號比較后,其偏差經過伺服放大后,送到電液轉換器,自動控制進汽量,以改變蒸汽轉矩,在轉速改變不大的情況下,達到新的平衡,以適應外界負荷或蒸汽狀態的變化。
1、汽輪機DEH系統組成
一個完善的汽輪機DEH系統由監視系統、調節系統、應力控制系統、保護系統、液壓伺服系統、汽輪機自啟停控制系統等組成,如圖1所示。
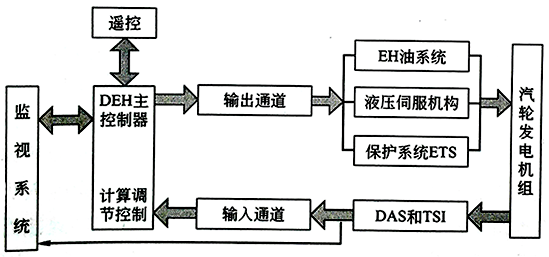 圖1 DEH系統結構圖
圖1 DEH系統結構圖監視系統可以保證汽輪機安全運行,連續監視汽輪機運行中各參數的變化。調節系統實現大范圍的轉速控制、負荷控制、異常工況下的負荷限制、主汽壓力控制以及閥門位置控制等。應力控制系統主要對高壓缸調節級和中壓缸第一級處轉子和汽缸的熱應力進行監視、溫度裕量計算和應力限制。保護系統是當汽輪機出現危險情況時,迅速關閉所有進汽閥,防止發生重大事故,保護汽輪機設備安全,同時提供閥門試驗功能。汽輪機DEH保護系統的基本思想是“寧可誤動,不可拒動”。液壓伺服系統包括供油系統和電液執行系統兩部分。供油系統為獨立高壓抗燃油系統,為電液執行機構提供12-16MPa的壓力穩定的壓力油電液執行機構由油動機、閥位檢測器、試驗電磁閥和電液轉換器組成,實現對閥門的控制。
汽輪機的參數監視通常由DAS和TSI(Turbine Supervision Instrument,汽輪機監視儀表)系統來實現。測量結果同時送往調節系統作限制條件,送往保護系統作保護條件,送往順序控制系統作控制條件。機械方面的參數主要有汽輪機轉速、軸振動、軸承振動、轉子軸向位移、轉子與汽缸的相對膨脹、汽缸的熱膨脹、主軸偏心度、油動機行程等。熱工方面的參數有主蒸汽壓力、主蒸汽溫度、凝汽器真空、高壓缸速度級后壓力、再熱蒸汽壓力和溫度、汽缸溫度、潤滑油壓、調節油壓、軸承溫度等。
轉速控制可以實現大范圍的轉速自動調節,使汽輪機從盤車轉速逐漸升到并網前轉速,調速范圍為50-3300r/min,調節精度為±(1-2)r/min,大多數電調系統是以實際轉速作為測量信號與轉速定值比較,將轉速偏差送入轉速控制回路運算,通過負荷控制回路輸出閥位控制指令,閥位指令作用于閥門控制回路去操作蒸汽閥門的啟閉,達到轉速控制目的。汽輪機升速過程中,轉速定值已預先給定的升速率連續變化、是一條隨時問增長的直線。升速率的值由汽輪機制造廠提供函數數據,運行操作人員可以根據汽輪機熱狀態進行選擇,也可以由控制系統自動選擇。
還有的電調系統采用升速率作為被調量來實現汽輪機升速過程的轉速控制。測取的實際轉速經微分后得到實際升速率信號,該信號與給定的升速率相比后得到升速率信號,此信號送至低選環節,低選環節同時接受轉速偏差信號,取兩偏差值的低值作轉速控制信號。機組升速過程中,由于轉速偏差值很大,故汽輪機按給定升速率控制轉速的上升。升速率可以由運行人員來選擇,也可以由電調系統根據機組的熱狀態自動選擇。當汽輪機轉速接近目標轉速時,轉速偏差小于升速率偏差,低選環節選擇轉速偏差為控制信號,這時汽輪機轉速很快穩定于目標轉速。
對于以上兩種情況,轉速控制還要采取一定技術措施保證汽輪機的安全,一是當升速過程中汽輪機出現工況異常,如振動過大等,應采取閉鎖升速,工況正常后繼續升速是當汽輪機過臨界轉速的,電調系統應能自動提高升速率,使汽輪機快速通過臨界轉速。
負荷控制是在汽輪機啟動升速過程結束、機組已完成并網任務后開始工作的。負荷控制的功能是通過開環或閉環工作方式去控制汽輪機發電機的負荷。閉環工作時,以發電機實發功率值為測量信號與功率定值相比較,得到功率偏差值經負荷控制回路運算后去控制調節閥的開度,達到調節功率的目的。開環工作時,根據功率定值及頻差信號由負荷控制回路直接給出閥門開度指令。無論應用哪種方式,最終都要使汽輪機實發功率達到功率給定值。功率給定值回路與轉速定值回路相似,也是根據目標負荷和變負荷速率給出連續變化的升負荷指令。變負荷速率通常由運行人員在(0.5%-10%)/min范圍內選擇。具有熱應力限制功能的電調系統可根據熱應力在線計算值限制變負荷速率的大小。
當機組并網發電后,轉速控制回路的轉速偏差實際上反映的是電網實際頻率與額定頻率之差。當出現頻差信號后,為了調節電網頻率使之維持在額定頻率(50Hz)值上,可將轉速偏差根據汽輪機靜態特性曲線轉換為功率偏差,然后通過負荷回路去調節機組的實發功率,使機組參加一次調頻。
2、汽輪機的啟動曲線
汽輪機的啟動過程分為升速-暖機-升速-暖機-升速-沖臨-升速-暖機升速一定速這樣幾個過程。可以看出汽輪機的啟動有點像爬山,當盤車帶動汽輪機啟動以后、打開主汽門,由高溫高壓蒸汽作為源動力推動汽輪機運作,到達一定速度后,汽輪機通過脫扣裝置與盤車脫開,沖轉開始,這個過程中需要監視汽輪機是否有異音,到500r/min后,汽輪機保持這個速度運行一段時間,稱為暖機。

圖2 汽輪機啟動曲線
①暖機
暖機主要的目的是使汽輪機內部機械強度、各方向應力、部件的熱膨脹、熱變形等指標緩慢上升。然后重新設定升速率和目標轉速,向下一個轉速1500r/min前進,同樣,到了目標轉速后,恒速運行一段時間,設定下一目標轉速2500r/min,到達這個速度之前會經歷一個臨界轉速,系統程序會自動設定更高的速率來沖過這個區域,這個過程稱為沖臨。
②什么是臨界轉速呢?
轉子在運轉中都會發生振動,轉子的振幅隨轉速的増大而增大,到某一轉速時振幅達到最大值(也就是平常所說的共振),超過這一轉速后振幅隨轉速增大逐漸減少,且穩定于某一范圍內,這一轉子振幅最大的轉速稱為轉子的臨界轉速。到2500r/min的時候,還需要暖機一段時間,然后按曲線達到3000r/min,此過程稱為定速。
根據汽輪機所處的狀態不同,比如冷態、暖態和熱態,每個過程的升速率和暖機時間會有不同設定值,這樣既保證了設備的安全運行,又節省了啟機時間。汽輪機從冷態啟動到正常運行需要的時間跟機組大小有很大關系,大概為3-6h不等。在并網要求下達以后,汽輪機DEH系統接收自動準同期裝置命令,把轉速控制交與自動準同期裝置,實現并網以后,DEH繼續根據負荷要求來調節汽輪機的轉速,實現汽輪機運行速度(3000±2)r/min的要求。
此處僅僅描述了汽輪機啟動的大概過程,實際運用中需要注意很多參數及系統工況等,因此需要非常仔細。
相關閱讀
汽輪機保護系統ETS
WOODWARD 505調速器故障處理實例






