PID控制器綜合了比例、積分和微分控制規律,昌暉儀表在本文總結了各種控制規律的特點及使用場合,供大家比較使用。
P控制規律
比例控制的輸出信號與輸入偏差成比例關系。偏差一旦產生,控制器立即產生控制作用以減小偏差,是最基本的控制規律。當僅有比例控制時系統輸出存在穩態誤差。
I控制規律
對于一個自動控制系統,如果在進入穩態后存在穩態誤差,則稱這個系統是有差系統。為了消除穩態誤差,必須引入積分控制規律。積分作用是對偏差進行積分,隨著時間的增加,積分輸出會增大,使穩態誤差進一步減小,直到偏差為零,才不再繼續增加。因此,采用積分控制規律的主要目的就是使系統無穩態誤差,提高系統的準確度。積分作用的強弱取決于積分時間常數TI,TI越大,積分作用越弱,反之則越強。
由于積分引入了相位滯后,使系統穩定性變差。因此,積分控制一般不單獨使用,通常結合比例控制構成比例積分(PI)控制器。
D控制規律
在微分控制中,控制器的輸出與輸入偏差信號的微分(即偏差的變化率)成正比關系。可減小超調量,并能在偏差信號的值變得太大之前,在系統中引入一個有效的早期修正信號,從而加快系統的動作速度,減少調節時間。
微分控制反映偏差的變化率,只有當偏差隨時間變化時,微分控制才會對系統起作用,而對無變化或緩慢變化的對象不起作用。因此微分控制在任何情況下不能單獨與被控制對象串聯使用。
需要說明的是,對于一臺實際的PID控制器,如果把微分時間TD調到零,就成為一臺比例積分控制器;如果報積分時間TI放大到最大,就成了一臺比例微分控制器;如果把微分時間調到零,同時把積分時間放到最大,就成了一臺純比例控制器。
由于PID控制規律綜合了比例、積分、微分三種控制規律的優點,具有較好的控制性能,因而應用范圍更廣。PID控制器可以調整的參數是KP、TI、TD。適當選取這三個參數的數值,可以獲得較好的控制質量,實際應用過程中很多工程技術人員對PID參數整定不是很理想,這是應選擇自整定功能強和控制算法先進的人工智能調節器,方便獲得最佳的PID參數。在選擇PID控制規律時,應根據被控對象的動態、靜態特性以及實際控制要求和控制品質來選擇。云南昌暉儀表制造有限公司給出了各種控制規律的特點及使用場合,供大家比較使用。
位式控制規律應用
優缺點:位式控制結構簡單,價格便宜;控制質量不高,被控變量會震蕩。
適用場合:位式控制適用于對象容量大,負荷變化小,控制質量要求不高,允許登幅震蕩場合。
位式控制儀表介紹:位式控制常用的有三位控制和四限控制兩類,比如顯示控制儀、雙回路顯示控制儀就屬于三位控制儀,每一路輸入信號有兩限報警輸出;四限報警控制儀每一路輸入有四限報警輸出。
位式控制作用下輸入e與輸出P(或P的關系):P=Pmax(e>0);P=Pmin(e<0)。
階躍作用下位式控制的響應(階躍幅值為A):

比例控制規律應用
優缺點:比例控制結構簡單,控制及時,參數整定方便;控制結果又穩態誤差。
適用場合:比例控制規律適用于對一階慣性對象,負荷變化不大,工藝要求不高,如果用于壓力、液位、串級副控回路等場合,可采用比控制。
比例控制作用下輸入e與輸出P(或P的關系):P=Kpe
階躍作用下比例控制的響應(階躍幅值為A):

比例積分控制規律應用
優缺點:比例積分控制規律能消除穩態誤差;積分作用控制慢,會使系統穩定性變差。
適用場合:比例積分規律適用于對象滯后較大,負荷變化較大,但變化緩慢,要求控制結果無穩態誤差場合。比例積分規律廣泛用于壓力、流量、液位和那些沒有大的事件滯后的具體對象。
比例積分控制作用下輸入e與輸出P(或P的關系):
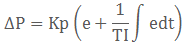
階躍作用下比例積分控制的響應(階躍幅值為A):

比例微分規律應用
優缺點:比例微分規律響應快,偏差小,能增加系統穩定性,有超前控制作用,可以克服對象的慣性;但控制作用有穩態誤差。
適用場合:比例微分規律適用于對象滯后較大,負荷變化不大,被控變量變化不頻繁,控制結果允許有穩態誤差存在的場合。
比例微分控制作用下輸入e與輸出P(或P的關系):
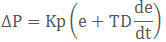
階躍作用下比例微分控制的響應(階躍幅值為A):

比例積分微分規律
優缺點:控制質量最高,無穩態誤差;但參數整定較麻煩。
適用場合:比例積分微分規律適用于對象滯后較大,負荷變化也較大,控制性能要求高的場合。適用于過熱蒸汽溫度控制、pH值控制等過程控制。
PID控制器介紹:國內很多儀表廠生產的調節器為經典控制算法的控制器,用在溫度控制或復雜工況時控制效果一般,建議大家使用控制算法更先進的人工智能控制器、模糊PID控制器等。
比例積分微分控制作用下輸入e與輸出P(或P的關系):

階躍作用下比例積分微分控制的響應(階躍幅值為A):







