Lambda整定提供非振蕩響應,其響應時間(Lambda)由工廠設定。七個工業實例說明了該方法的相關性和簡單性。Lambda整定PID參數在過程控制回路中有效嗎嗎?—Mark T.Coughran
PID是目前工業過程中最常見的反饋控制算法。許多控制工程師被要求選擇P、I和D調節器的調節參數。我們經常面臨這六個常見挑戰中的一個或多個:
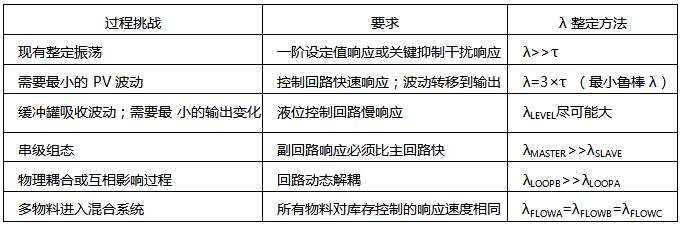
|考慮到這些挑戰,尋找最佳PID參數的系統和實用方法是什么?不要把你自己與神秘的統計數據混淆;使用你對工廠的了解。從回路目的、可能與其他回路的耦合以及過程對控制器的響應能力(過程動態)開始。例如,實際上過程工業中幾乎沒有控制回路,其目的是振蕩。為了滿足工廠的生產目標,防止回路之間的相互作用,大多數回路需要在一定時間內作出響應。學習哪些回路需要快速,哪些需要緩慢,將使您的調優工作對設備更有價值。最后,過程動態(手動響應)將限制您做出閉環(自動)響應的速度。
lambda 調優在數千個控制回路中被證明是成功的,這些控制回路涵蓋了以下過程控制應 用程序:
1、連續和批處理過程中的反饋控制回路(圖1)。

圖1 基礎反饋控制回路
2、所有制造商提供的所有類型的PID調節器-DCS、PLC、單回路、氣動。
3、物理過程,包括流量、壓力(液體和氣體)、液位(液體和固體)、溫度(熱交換、混合、反應)和成分(密度、pH、煙囪O2、溶解氧等)。
4、過程工業,包括化工、煉油、石油天然氣、電力、生命科學、紙漿和造紙、金屬和采礦以及管道。
5、改造工廠優化、新工廠工廠啟動、控制系統設計和仿真以及教育的環境。
Lambda整定概念
Lambda整定是一種與內模控制和模型預測控制相關的基于模型的方法。它背后的數學使用零極點抵消來實現所需的閉環響應。但是,要應用該方法,如果您的過程動態適合以下任何模型,則只需要簡單的算法(如圖2所示):
a、一階
b、積分器
c、積分器,一階滯后
d、積分器,一階超前
e、積分器,非最小相位
f、二階,過阻尼
g、二階,欠阻尼
h、二級,超前
i、二階,超前超調
j、二階非最小相位
每個過程模型包括純滯后。類型a、f和j是自衡對象;也就是說,對于輸出階躍,PV最終會達到一個新值。過程動態模型通常通過手動模式(開環)下的階躍測試來辨識。階躍測試也有助于識別過程響應中的非線性,例如控制閥中的死區,這可能是比發現的調節器整定更大的問題。
我們假設圖1中的PID調節器塊包含一個PID算法。工藝塊包括最終控制元件或副回路、要控制的工藝(化學、液壓、熱能等)和傳感器/變送器。Lambda整定對設定值變化和負載干擾提供非振蕩響應。選擇響應時間(Lambda或λ)以適合控制策略和單元生產目標。您工廠中的大多數過程將適用一階模型或積分器模型模擬。
圖2 兩個最簡單和最常見的流程響應的lambda優化方法
圖2所示的過程模型內置于一些控制系統調整工具中。理想的工具包括過程模型識別、Lambda優化算法、Lambda選擇建議以及預測的設定值和負載響應。
工藝裝置示例
讓我們來看幾個來自過程工廠的例子。在每個例子中,Lambda都有明確的物理意義。我們從穩定過程動態開始。圖3顯示了流程回路的典型結果。

圖3 天然氣液體通過控制閥進入脫丙烷塔的閉環流量控制
PID調節器在DCS中執行。過程模型為一階加純滯后時間。純滯后時間(出現在開環和閉環中)主要是由于控制閥響應的非線性。
調節器整定的魯棒性考慮到過程動態學(過程增益、純滯后時間和時間常數)可能在其他過程條件下發生顯著變化。對于魯棒性來說,選擇lambda等于純滯后時間的倍數是明智的。注:在上述情況下,我們選擇了λ=3×τ。

圖4 從儲罐泵入烯烴裝置丙烯壓縮機的潤滑油的壓力控制
保持油壓對機組運行至關重要。壓力通過一個旁路控制閥將部分流量送回儲液罐來控制。PID在氣動控制器中執行,油直接連接到控制器傳感元件,輸出(3~15PSIG)進入旁路閥上的氣動定位器。
這個例子表明,如果開環過程響應很快,并且工廠需要快速的回路響應,我們可以使閉環響應非常快。但請注意,我們選擇的Lambda值也不小于3×τ。
積分過程通常對工廠的性能和盈利能力至關重要。對于積分過程,很難猜測比例和積分設置的組合不會引起振蕩。需要一種系統的整定方法來獲得穩定性和性能。第一個積分過程示例是沒有流量副回路的液位控制器。

圖5 油田采出水處理罐液位控制
以前的整定會在自動模式下引起較大的振蕩,因此操作員會將液位控制器保持在手動模式。對于此處顯示的Lambda整定數據,在負載擾動后,液位PV最初返回到SP;因此流入略大于流出。然后在負載流(流出)上出現一個階躍;注意流入響應平穩增加。停止時間或Lambda是指PV達到最大偏差并開始返回到SP的時間。達到穩定狀態后,將不會出現振蕩。
我們選擇Lambda=240,以使液位PV遠離針對大擾動時的警報限值。對于需要嚴格級別控制的應用程序,可以選擇較小的Lambda值。例如,在鍋爐汽包水位控制中,PV警報與SP非常接近。
下一個積分過程示例來自不同的過程行業和更小的容器。
控制")
圖6 2升生物反應器中的溶解氧(DO)控制
PV測量為溶液的飽和百分比。DO控制器的輸出進入一個流量副回路,該回路將氧氣(O2)噴射到生物反應器中,并調節lambda=20秒。CO2流入反應器以控制酸堿度;然而,它也會取代氧氣,使CO2成為負荷變量。過程模型(手動測量)是積分器。PID控制器在DCS中執行。
選擇的lambda將在這個批處理應用程序中保持DP足夠接近SP,因為文化的發展-以及氧氣需求的變化。它還符合串級規則,即 λMASTER>>λSLAVE。
到目前為止,對于積分過程,我們只檢查了負載響應。如果調節器是任何默認的標準PID類型,在調節器中使用積分作用,并且如果是積分過程,那么任何整定方法都會導致設定值階躍超調。

圖7 煉油廠汽油加氫裝置反應器壓力控制
PID調節器在標準結構的DCS中執行,輸出到反應器出口的控制閥。過程模型(在手動模式下測量)是積分器。
原來的整定導致PV上出現一個±1PSIG的循環。周期上的尖角表明調節周期因控制閥中的死區而變得復雜。仔細檢查顯示死區約為控制器輸出的0.7%。使用λ=110秒的Lambda整定可以消除大的整定周期;我們只剩下死區引起的小極限周期。為了測試Lambda整定回路的穩定性,操作人員無法進行載荷步驟。然而,它們可以方便地修改設定值。PV在大約110秒內穿過SP,并在返回非線性極限循環之前進行小的超調。
如果SP超調是工廠的一個問題,那么在現代調節器中,可以通過選擇一個備用PID結構或添加一個設定值濾波器來很容易地防止超調。另一方面,對于許多積分過程,包括這里顯示的四個例子-設定值很少改變。
最后的圖形示例顯示了一個調優良好的緩沖罐液位調節器。您對這個回路的主要貢獻是認識到控制需要緩慢!然后Lambda調優提供了一種直接而簡單的方法來實現這一點。

圖8 供應脫丙烷塔的緩沖罐中天然氣液體的液位控制
液位調節器輸出串級到緩沖罐出口上的一個流量副回路,圖3的Lambda=10。干擾是流入油箱的流量。過程模型是積分器。PID控制在DCS中執行。
原來的整定是快速和振蕩的;相反,Lambda整定沒有系統振蕩,除非負載振蕩。在這種情況下,我們選擇了一個大的Lambda來吸收變化性;也就是說,將被操縱變量的變化最小化。Lambda=3000是最慢的調整,它將使PV遠離最壞情況下流量變化的警報。注意,盡管在工廠啟動期間,進水量發生了很大變化,但仍有穩定的流出量。
通過串級控制實例,指出了防止主從回路相互作用的必要性。Lambda優化是唯一明確提供此要求的方法;我們只需選擇λMASTER>>λSLAVE。另一種需要回路解耦的常見物理耦合類型涉及串聯的多個控制閥。例如,一個化工廠的工藝水的壓力從2500磅/平方英寸降至600磅/平方英寸,第二個壓力從600磅/平方英寸降至150磅/平方英寸,然后是一個流量回路。為了使所有的循環都能自動運行并具有良好的系統性能,我們選擇了分別為6秒、30秒和80秒的Lambda值。
總結
昌暉儀表已經演示了Lambda整定在幾個具有不同類型的PID調節器和不同的控制目標的過程工廠的應用。在每種情況下,我們都獲得了一個平穩的響應,相應的響應時間(lambda或λ)-在0.6到3000秒之間。該方法考慮了過程對控制調節器(過程動態)的響應能力、回路的目的以及與其他回路的耦合。
對于我們最初的問題,“Lambda整定PID參數在過程控制回路中有效嗎?”您現在應該可以回答 “是”。最重要的用戶需求是根據單元目標和過程約束選擇響應時間λ。公式很簡單,有培訓和工具。但是如果你想要一個振蕩響應或者任意的響應時間,你需要尋找不同的方法。
作者:馮少輝博士(現從事先進控制工作,有一線十幾年工作經歷,真正理論聯系實際的過程控制專家)






