ABB伺服驅(qū)動器是智能化的伺服驅(qū)動器產(chǎn)品,可以使用Mint Workbench(ABB的伺服編程軟件)進(jìn)行編程,以實現(xiàn)單軸的運動控制功能。
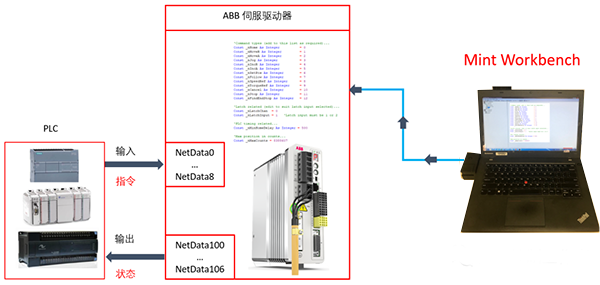
在驅(qū)動器內(nèi)下載ABB標(biāo)準(zhǔn)的GDI程序。標(biāo)準(zhǔn)GDI程序為伺服驅(qū)動器定義了一系列輸入和輸出寄存器(NetData)。上位PLC可通過對NetData的讀寫,實現(xiàn)對ABB伺服的控制。
ABB伺服驅(qū)動器支持ProfiNet,ModbusTCP,EtherNet/IP,EtherCAT,EtherNet Powerlink等工業(yè)以太網(wǎng)。支持任意一種協(xié)議的PLC產(chǎn)品,都可實現(xiàn)對ABB伺服驅(qū)動器的控制。
伺服軸的運動控制算法存在于驅(qū)動器內(nèi),從PLC側(cè)無需執(zhí)行實時位置的生成算法(Profiler, 或類似Beckhoff PLC的NC軸的功能)。因此PLC的負(fù)荷很小,用較低端的PLC即可實現(xiàn)對多個伺服軸的單軸運動控制。
在實踐中,GDI控制方案可很好得替代傳統(tǒng)PTO方案,配線簡單,控制穩(wěn)定,綜合成本較低。
GDI伺服驅(qū)動器的準(zhǔn)備
測試系統(tǒng)的基本組成。PLC采用ABB新一代eCo系列PLC:PM5072-T-2ETH。 通訊協(xié)議采用Modbus TCP。
①ABB可提供標(biāo)準(zhǔn)的GDI程序,以及基于PLC的Modbus TCP標(biāo)準(zhǔn)例程。客戶方案可在例程的基礎(chǔ)上進(jìn)行開發(fā)。
②在Mint中,GDI程序的下載,及有關(guān)Modbus TCP的基本設(shè)置。
備注:未包含ABB伺服的常規(guī)整定,整定步驟可參考官方相關(guān)資料。






