在未來幾十年,過程控制活動的重點很可能是多變量控制。這是過程自動化進程中的下一階段。更好的工具使先進過程控制(APC)方法可適用于更多的應用。
雖然多變量控制活動已經應用幾十年,但傳統的多變量控制范式-基于模型的控制(MPC)和實時優化,從未發展成為過程行業所需的多變量控制核心能力。很明顯,還有很多工作要做,需要更敏捷的工具來完成這些工作。
現代多變量控制范式,將結合之前MPC時代的單回路過程控制原則,以及關鍵多變量控制的經驗教訓。核心的多變量控制原理和寶貴的經驗對于控制工程師來說非常重要。其中最主要的是矩陣的概念,因為它在多變量控制中的重要作用,以及它在有效過程操作、約束管理和過程優化中的作用。
APC的連接和方向
關于任何控制器,無論是單回路還是多變量控制器,首先要了解的是它的連接和方向。
在單回路控制中,“連接”是指哪些變送器(或其它過程測量)和閥門(或其它最終控制元件)連接到控制器。這些內容通常顯示在管道和儀表圖(P&ID)、控制系統圖以及許多其它類型的工藝文件中。每個上下文信息可能還包括額外的控制器細節,但連接信息是了解控制器角色所需的最少信息,即哪個變量由哪個閥門(或哪個“手柄”)控制,以便一目了然地掌握控制器的作用。
矩陣圖為多變量控制器提供了相同的信息。它顯示了哪些操縱變量(MV)與哪些受控變量(CV)相連,哪些MV可用于約束控制,哪些CV可優化。與單回路控制一樣,這是理解多變量控制器在過程運營中作用的起點。
理解APC的控制動作
下一個最重要的信息是控制方向,這是過程增益的標志。例如,如果單回路控制器輸出或多變量控制器MV增加,受控變量的響應是增加還是減少?
在單回路控制中,這也被稱為控制動作(分別為負向或正向)。在多變量控制中,它也被稱為增益方向(分別為正或負)。了解控制方向,對于理解利用每個MV/CV連接進行控制和優化的可能性、局限性和競爭利益是必要的。
控制方向是過程模型最持久的方面。一個單回路控制器在其使用壽命中可能會被重新調整很多次,但其控制方向不會改變——這是過程設計和控制器連接的基本結果。MPC的經驗也表明,其他模型參數(如動態定時和增益大小)可能會經常改變,但增益方向永遠不會改變。
連接和方向共同定義控制器的基本機制和功能,剩下的就是整定了。控制工程師通常對控制器的其它細節感興趣,但以矩陣圖的方便形式表示的連接和方向,包含了運營團隊所有成員在多變量約束管理和過程優化中有效協作所需的基本信息。
擴展到APC之外的矩陣圖
在MPC時代,矩陣圖經常被隱藏起來,主要是APC工程師對其感興趣。經驗表明,矩陣圖是一種有效的工具,可以簡明扼要地表示任何工藝運營的多變量性質。這使得矩陣圖成為整個運營團隊關注的焦點,包括工藝工程師、運營人員、分布式控制系統(DCS)和APC工程師以及所有其它過程運營和優化利益相關者。矩陣圖已被證明是最有效和最合適的工具之一,在管理過程約束和實現過程優化時,使所有利益相關者理解一致。

圖1:矩陣圖顯示了多變量控制器的連接和方向,包括運營團隊所有成員就約束控制和優化目標進行協作所需的基本信息。加號或減號表示每個操縱變量/ 受控變量(MV/CV)連接的控制方向,用于控制和優化目的。
在現代多變量控制范式中,矩陣圖的起點發生了變化。它們不是源自APC項目,而是源自工藝工程師,也被稱為生產或運營工程師,在指導日常運營以提高可靠性和優化方面發揮,他們通常發揮主導作用。
工藝工程師還可以使用矩陣圖作為與其它運營團隊溝通和討論的工具。從工藝工程師開發的工作草圖開始,矩陣圖可以移植到工藝手冊、培訓材料、運營程序、控制系統圖形中,最終移植到自動化多變量控制器中。順便說一句,隨著矩陣圖的發展,它在應用中得到了改進和驗證,因此在部署到在線控制器之前,已經獲得了運營團隊的認可。
無論是由運營團隊手動執行還是借助多變量控制器自動執行,多變量約束控制和優化一直是幾乎所有過程運營的固有特性。但在MPC時代之前,行業缺乏有效的工具和最佳實踐,無法以實用簡潔的格式獲取和共享這些關鍵的運營信息。將矩陣納入過程自動化的主流視野,可能最終被證明是MPC 時代最重要的貢獻之一。
運營矩陣設計技巧
在傳統的MPC實踐中,矩陣設計通常包括通過全面的工廠階躍測試,確定所有MV/CV過程的相互作用。每一個過程交互,無論在使用中有多小或潛在的問題,都會成為矩陣中的一個連接。但從經驗豐富的工藝運營者的角度來看,對于各種約束控制和優化目的,已知數量有限的MV 通常是有效的,并已在運行中得到驗證。其它很多問題是已知的,因此可以根據經驗和各種工藝和設備運營來考慮,在運營中避免這些問題。這就是理論矩陣設計和運營矩陣設計之間的區別。通常,與工藝和運營人員的討論很容易揭示出問題所在,尤其是當每個人都了解矩陣圖基礎知識時。
運營矩陣設計通常會導致多個、更小、密度更低的矩陣設計,而不是根據MPC 理論設計更大的矩陣。例如,工藝工程師和控制臺運營員通常可以根據經驗和知識,在不進行工廠測試的情況下,直接解釋使用哪些MV來實現哪些約束和優化目標。
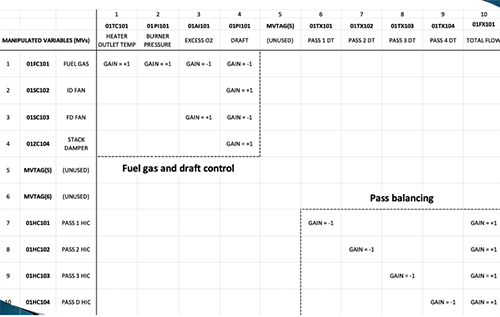
圖2:加熱器控制的矩陣設計包括燃氣、通風和通道平衡。在冗余控制層,該應用可以以較快的速度運行,因此它可以適應快速和慢速受控變量。在無模型多變量控制中,矩陣包含增益方向,而不是詳細的動態模型。
工藝工程師和控制臺運營員很少提及(或批準使用)兩個或三個以上的控制手柄;通常是一個或兩個。由于切割掉無效或有問題的控制手柄,矩陣密度降低,因此更容易劃分為更小、更易于管理的部分。
在運營矩陣設計中,一個很好的經驗法則是,如果在任何一個矩陣列中有三個以上的模型(或連接),則需要進一步審查。這種做法沒有確切的理由,但經驗表明,工業過程和設備運營現實的最終效果:對于任何一個目標,超過兩個或三個有用手柄的情況很少(多個“平行手柄”的情況除外,如加熱器通道平衡)。不良因素回路指標,也可用于幫助識別現有的手動多變量控制實踐,這些實踐已在運營中建立。
基礎層的多變量控制
隨著多變量控制作為核心能力的出現,以及更高效、更可靠的控制算法,多變量控制可以從監控層遷移到基礎層。這帶來了重要的性能和可靠性改進,尤其是控制器冗余和高速執行。
冗余意味著“如果APC關閉或不可用怎么辦?”之類的問題,不再成為一個復雜的因素。相反,小型、快速的APC應用,可以設計為在底層連續運行,就像其它底層單回路或先進管理控制一樣。
高速執行意味著基礎層中的多變量控制器可以將快速CV與慢速CV結合起來。監控層的傳統APC的運行周期通常是30秒或60秒,并且只能適應慢速CV,但許多過程變量的響應速度要遠遠快于此。基礎層APC的執行周期可能是1到5秒,因此它可以在一個多變量控制矩陣中整合快速CV和慢速CV。
工業上最常見的多變量控制應用之一,就是燃燒加熱器控制。在過去,快速或關鍵CV(如燃燒器壓力)需要運行在基礎層,而慢速CV(如過量氧氣或通道平衡)通常在監控層的傳統基于模型的多變量控制器中實現。這種拆分方案的實施、維護和運營非常復雜,并且會影響性能。在基礎層使用APC時,整個多變量控制應用可以在一個組合矩陣中實現,從而顯著提高可靠性和性能。
作者:Allan Kern






