在DCS中,當輸入信號發生突變時,往往是因為相關的儀表出現故障或者控制閥位置發生突變或者是工藝條件發生大的變化,這個時候需要立即進行排查,解決故障,不然有可能釀成比較嚴重的事故;
在橫河DCS系統中,有相應的功能可以配置使用,就是輸入信號變化率報警,輸入信號變化率報警是一種檢測過程變量PV(process variable)在一定時間內的變化是否超過變化率報警設定值VL的功能。
當確定過程變量PV(process variable)在規定時間內的變化超過報警設定值VL時,如果變化呈遞增方向,則啟動正方向(VEL+)速率報警。同樣,如果變化方向是遞減的,則激活負方向的速率報警(VEL-);
輸入信號變化率報警表示過程條件的突然變化和檢測器或變送器的異常,當然可能的原因在開頭已經提過了;
在報警狀態下,如果過程變量PV(process variable PV)在規定時間內的變化量在告警遲滯值HYS減去報警設定值VL的范圍內,系統將從告警狀態中恢復。
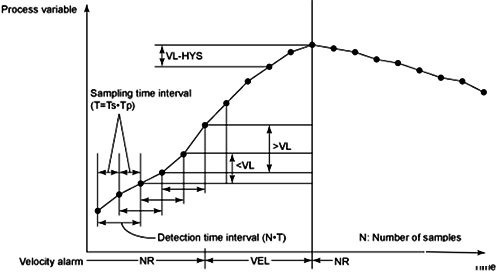
上圖中的采樣個數N=2,可以結合定義理解上圖的作用機理;
上圖中的采樣時間間隔(T)的值由設定的采樣間隔(Tp)和功能塊的掃描周期(Ts)計算得出,即:T=Tp*Ts;一旦報警被激發,報警至少在采樣的時間間隔(T)內是有效的;
在System View中的Function Block Detail Definition的Alarm組態中,輸入信號變化速率報警檢查類型、速度告警設定值(VL)、告警遲滯值(HYS)、采樣個數(N)、采樣間隔(Tp)均可自定義。
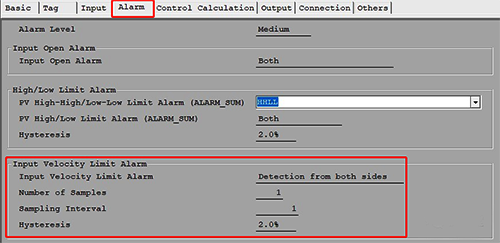
Input Velocity Limit Alarm:有三種方式可以選擇,分別是:“Both”、“Single”和“No”,默認是”Both“;這個很好理解;

需要注意的是:當輸入信號變化率報警校驗類型選擇“Single”時,當報警設定值(VL)為正號時,只監控正方向的速率;當報警設定值為負號時,只監控負方向的速率。而當VL=0時,無論輸入信號變化率報警檢查類型是什么,都對兩個方向的速率進行監測。當輸入信號變化率報警校驗類型選擇“Both”時,采用速度報警設定值(VL)的絕對值進行監測;
報警設定值VL可以在操作監視畫面上調出相應面板的調整參數里設置;
當類型設置為單一方向時,在速度報警設定值(VL)的工程單元數據中添加待檢測方向的符號(+或-)。當將與PV量程跨度相同的值(正值)設置為速度報警設定值(VL)時,無論輸入速度報警校驗類型如何,都不會發生正負方向速度報警。
像其它的報警一樣,還可以設置報警滯后值Alarm Hysteresis Value (HYS),取值范圍可以為0 ~ PV量程跨度范圍的工程數值,或PV量程跨度范圍的百分比數據,使用百分比數據時,要在數值后加上%,默認值是2.0%。

采樣次數(N)和采樣間隔(Tp):采樣間隔(Tp)和采樣次數(N)在Function Block Detail Builder中定義;
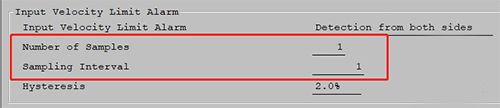
采樣次數(N):可設置為1-12內的數,默認為1;采樣間隔(Tp):可設置為1-10000內的整數值,單位為掃描周期,默認為1。
有了這個VEL±的報警后,可以利用這個報警狀態,進行相應的提醒、聯鎖等其它的應用,以此來提醒操作人員快速響應來處理異常,實現穩定運行。






