【Q1】生產過程中整定PID,如何避免或者減少對裝置產生的安全風險?
【A】:在整定過程中,為什么會說有風險?是因為在化工裝置里,由于我們不合理的使用參數,實質上會導致過多的使用控制資產或者調節閥的動作,然后引起整個系統波動。
第一,整定方法科學化。
在整個的整定過程中,需要工程師通過不斷地實驗,在裝置上經歷很多事情才能形成一定的知識儲備。
第二,在操作工旁邊整定。
所有的整定工作都意味著對生產過程中的影響和干預。這個影響和干預實質上是需要對裝置操作負責的操作工知道的。非常建議大家在操作工旁邊整定,向其說明你要操作的步驟,操作工會對你做的事情有一個預估并了解整定過程中可能存在的風險與因果關系,這件事情非常重要。
第三,分析做好記錄。
要對工藝過程進行分析,嘗試去理解,努力去找到問題的根源,然后才進行整定,也是希望能夠有一個很好的交付,實際上是一個系統化的工作。
第四,PID控制輸出限幅。
當使用Lambda整定方法的時候,算出的參數和原參數會有非常大的變化。例如,一回路的積分時間是5秒,此設置不合適,需要改成300秒。從5秒到300秒,存在60倍的差距,對于如此大的差距,如果做出錯誤的結論,可能會導致風險。某廠壓縮機比例度本來是從90改成45,結果改成了4,由于比例度大幅度變化,會導致系統震蕩以后,壓縮機它反應很快,有些緊急停車系統就因為波動異常而停車。
防止該現象最有效的辦法就是要對裝置充滿敬意,同時自己要非常小心和謹慎,即在最開始大幅度修改參數之前,我們至少要對控制器的輸出做一個限幅,萬一參數不對,控制器的輸出不會有大幅度的偏離當前工作點的一個狀況發生。當我們修改完參數,發現整個的控制器的輸出在我們想象中的范圍里,我們可以逐漸的把限幅放開。
【Q2】:PID參數整定的實質到底是什么?
【A】:在PID控制器形式確定的情況下,被控對象的特征也是確定的,那么現在能不能找一組參數?在現有形式結構情況下,設計出一個控制器,讓它和被控對象組成一個新的系統,組成一個整體,他們整體的響應能夠達到我們的預期,能夠實現期望的閉環性能。
如果現有的控制器通過調整參數,整個系統還是實現不了我們想要的閉環性能意味著什么?意味著,現在靠單一的PID可能不行,也許是控制方案重新設計才是對的,這是問題的關鍵。
【Q3】:調整的規律及注意事項有哪些?
【A】:總體、要求、方法、過程、經驗
控制方案很重要,回路整定要搞好。
比例積分作用大,特況再把微分加。
既要跟蹤又抗擾,控制強度不能小。
要想超調無振蕩,控制作用切勿強。
自衡對象積分定,比例作用適當動。
非衡對象積分弱,比例作用不能過。
開環測試定模型,控制參數公式定。
方法雖好干擾多,閉環階躍不可缺。
手動不穩有外擾,自動振蕩內部找。
同相振蕩比例降,異相振蕩積分削。
【Q4】:在做溫度控制PID整定的時候,用Lambda整定,怎么能夠比較準確的從響應曲線去對K 、T、 τ 取值?
【A】:第一,K只和穩態相關容易計算。
通過響應曲線,把被控對象的所有特征取到,其中最主要特征叫做增益K 、等效時間常數T、等效純滯后τ。其中增益K只和穩態有關系。和穩態有關系,以后就比較容易計算。整個PV值的穩態變化和OP值的穩態變化的比值就能夠計算出K,K值是非常準確和確定的。
第二,T+τ很重要。
T+τ的總和決定了被控對象的主特征。通過PV值變化63.2%的這個點和初始點來確定T+τ。確定T+τ后,就要決定總和里前面第一段τ,與后一段T。

T與τ如何切割才能達到我們預期的性能呢?我們發現只要純滯后,不要被低估,把純滯后估的稍微大一點,最終得到的KT是能夠使用的。(舉下例說明便于理解)
有一個對象,這個對象有一個5秒的純滯后,它的時間常數是25秒。嘗試對它進行控制。其實,最準確的估值是知道純滯后與時間常數分別是多少,那么就是標稱對象,即時間常數為25秒(如圖紅色線)

在T+τ=30,重新估計,純滯后是10秒,時間常數為20秒,得到如圖綠色線。
在T+τ=30,再重新估計,純滯后是20秒,時間常數為10秒,得到如圖藍色線。
在T+τ=30,再重新估計,純滯后是25秒,時間常數為5秒,得到如圖黃色線。
其實,當T+τ確定以后,只要按照高估純滯后的原則,總能夠得到一個PID參數,能夠對它進行穩定控制。當我們取得對象有偏差的時候,它也可以進行穩定的控制。這是每一組PID都可以實現對被控對象的控制,這個響應的特性會有變化,但是總的來說都是有超調,只有一個超調就可以穩定的過來。這既是PID的能力,也與我們如何看待被控對象和PID有關系。
第三,不能低估τ。
【Q5】:串級控制,主副回路的PID參數如何整定?有先后順序嗎?
【A】:對于PID的串級控制來說,應攘外必先安內,二人同心其利斷金(先內后外、內快外慢、內平外動、內外交錯)。
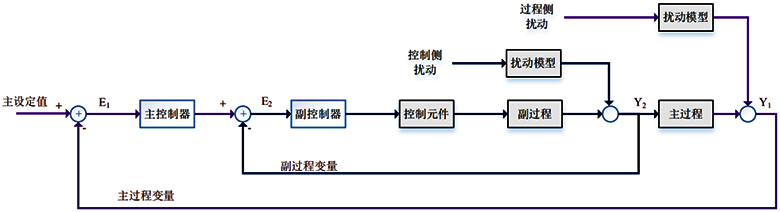
首先讓副回路手動,那么主回路必然是手動的,因為它不能工作,做了測試后會得到一個模型,基于該模型,我們用Lambda方法會得到一個副回路的控制器參數,讓其投串級。當把副回路投串級后,可以在主回路的輸出上通過改變輸出,借此影響副回路設定值,影響回路的工作,最終影響主回路的輸出。
我們在主回路手動,副回路打串級模式的情況下,在主回路的設定輸出上做一個階躍測試,會得到一個廣義的模型。該模型是進行主控制器參數整定的過程。一定要按照順序,按照正確的過程來整定,把它理解成一個單回路即可。
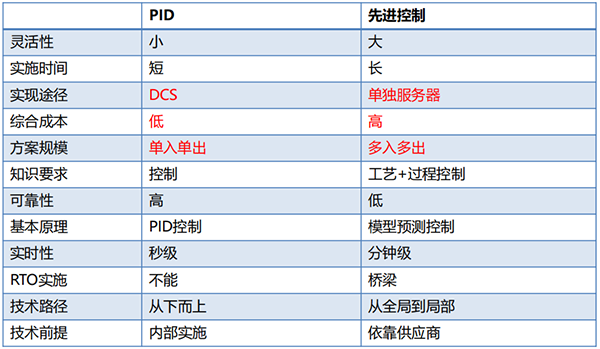
【Q6】:PID與APC區別?
【A】:
【Q7】:對于大滯后系統,滯后到什么程度,不適合用PID?
【A】:其實不存在任何關于PID適用范圍的說法,低階對象PID普遍適用,和滯后無關。如果這個對象是一個低階對象,簡單說,是一個一階對象,使用PID一定是最優的,因為一個兩參數模型只需要兩參數就夠了,如果是三參數模型,使用三個參數就可以實現最優了,如果對象是高階的,使用高階的模型才有可能獲得收益。
【Q8】:如何對控制回路中的各參數進行修正,必須通過曲線圖觀察,然后不斷整定嗎?
【A】:整定方法是三步走,并不光是看曲線。通過開環的測試,能夠得到被控對象的模型,再利用模型和目標來確定出PID參數(基本上都是兩參數:比例和積分時間)。把此參數算出后,放到系統里面去修改,再測試。一般情況下,計算得到的PID參數和原參數會有非常大的差別。若在第一個環節出錯,會導致最終的控制性能不理想,此時,需要準確地辨別被控對象的控制模型。有的可以簡化到使用默認參數,但從方法上來說,是用三步的方法,也就是用Lambda整定方法。
【Q9】:PID參數整定的方法試湊法有什么弊端?
【A】:第一,慢。在實際工作過程中,當你使用試湊的方法的話,最主要的工作是慢;第二,工程師要求高。理論知識不夠扎實,同時還需要更多的經驗積累和不斷摸索;第三,知識碎片化不可傳承。具有能力但卻無法將其系統化地傳授給他人,經驗的不可復制與不可推廣給整個行業帶來了很大的弊端。
【Q10】:調節閥首次安裝上電后,PID如何整定,最節省時間?
【A】:一般來說,在剛開始的時候開環做一次測試,是最簡單,最快的確定一個對象特征的一個方法。如果來不及做,那就把壓力和溫度重點去做測試,其他的先給個初始值,用算的或者默認值設置,回頭再一個個去看。
總之,PID整定在工業控制領域中具有非常重要的地位。通過科學合理的PID整定,可以提高系統的控制精度和穩定性,從而提高生產效率,降低能耗,減少生產成本,提高產品質量,為工業生產帶來更多的益處。






