大量的研究和應(yīng)用偏向與大數(shù)據(jù)和市場(chǎng)營(yíng)銷,而我們希望回歸制造業(yè)本身,聊一聊如何將人工智能應(yīng)用于過(guò)程工業(yè)的核心領(lǐng)域:過(guò)程控制。
過(guò)程控制數(shù)據(jù)分析與PCA
過(guò)程控制或質(zhì)量控制是監(jiān)控和調(diào)整工業(yè)制造過(guò)程以保持預(yù)期生產(chǎn)結(jié)果、優(yōu)化生產(chǎn)效率的實(shí)踐。
也許你不熟悉制造業(yè),沒(méi)關(guān)系,你很可能聽(tīng)說(shuō)過(guò)六西格瑪。六西格瑪最初是制造業(yè)使用統(tǒng)計(jì)技術(shù)進(jìn)行質(zhì)量控制和過(guò)程改進(jìn)的一套工具。
直至今天,過(guò)程工程師們?nèi)匀辉谑褂靡粤鞲瘳敒榇淼牡慕y(tǒng)計(jì)過(guò)程控制(Statistical Process Control,SPC)監(jiān)控制造過(guò)程的許多樣本,例如芯片制造過(guò)程中測(cè)量的關(guān)鍵尺寸、化學(xué)反應(yīng)器內(nèi)的溫度等。工程師們?cè)诳刂茍D(controlchart)中通過(guò)可視化來(lái)研究生產(chǎn)過(guò)程的能力(ProcessCapability),并從統(tǒng)計(jì)學(xué)角度分析樣本,使用均值、標(biāo)準(zhǔn)差/也就是西格瑪,以及低于下閾值或高于上閾值的估計(jì)概率。
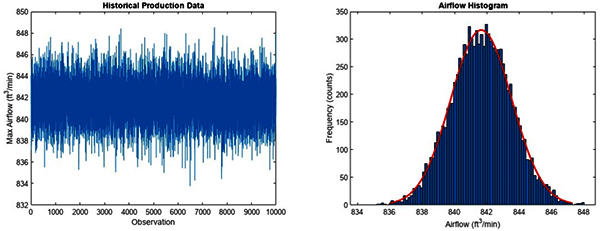
Process Capability
mu—Sample mean
sigma—Sample standard deviation
Pl—Estimated probability of being below Lower
Pu—Estimated probability of being above Upper
Cp—(U-L)/(6*sigma)
Cpl—(mu-L)./(3.*sigma)
Cpu—(U-mu)./(3.*sigma)
Cpk—min(Cpl,Cpu)
(p.s.MATLAB提供易用的過(guò)程控制分析工具,但統(tǒng)計(jì)過(guò)程控制也有其局限性:不能測(cè)量太多的變量,不能識(shí)別問(wèn)題的來(lái)源,不能確定解決方案,典型的SPC分析需要專家等。
那么,人工智能能否幫助突破統(tǒng)計(jì)過(guò)程控制的這些限制嗎?答案是肯定的。機(jī)器學(xué)習(xí)技術(shù)可以補(bǔ)能傳統(tǒng)的統(tǒng)計(jì)過(guò)程控制。原因是:過(guò)程數(shù)據(jù)通常涉及來(lái)自不同來(lái)源的大量變量,這通常比大量觀測(cè)更難處理。
如何確定需要關(guān)注的主要變量是什么?它們對(duì)這個(gè)過(guò)程有什么影響?以及如何控制這些變量,以便始終如一地實(shí)現(xiàn)高質(zhì)量并保持低成本?
而機(jī)器學(xué)習(xí)可以幫助處理大量變量。例如,主成分分析(PCA)和潛在結(jié)構(gòu)投影(PLS)非常適合分析和理解過(guò)程數(shù)據(jù)。這些算法通過(guò)探索變量之間的相關(guān)性來(lái)識(shí)別重要因素,幫助我們優(yōu)化流程并找到最佳操作參數(shù)。
機(jī)器學(xué)習(xí)還可以從歷史數(shù)據(jù)中學(xué)習(xí),適用于處理分類、回歸、識(shí)別非線性模式和異常檢測(cè)等任務(wù)。
2、利用SVM進(jìn)行過(guò)程監(jiān)控
在電解銅生產(chǎn)過(guò)程中,一年內(nèi)每天測(cè)量?jī)蓚€(gè)銅樣品,并記錄八種金屬雜質(zhì)(Ag/銀、Ni/鎳、Pb/鉛、Bi/鉍、Sb/銻、As/砷、Te/碲、Se/硒)的水平。
我們可以應(yīng)用控制圖,通過(guò)評(píng)估過(guò)程可變性來(lái)監(jiān)測(cè)和改進(jìn)產(chǎn)品或過(guò)程。
識(shí)別過(guò)程異常的一種更強(qiáng)大的方法是應(yīng)用無(wú)監(jiān)督異常檢測(cè),例如OneClassSVM。無(wú)監(jiān)督方法不需要標(biāo)記異常,但您需要了解異常發(fā)生的頻率。
下圖為OneClassSVM檢測(cè)四種金屬雜質(zhì)的結(jié)果:
四種金屬雜質(zhì)的結(jié)果")
這種方法也可以方便地?cái)U(kuò)展為針對(duì)流式數(shù)據(jù)的增量學(xué)習(xí)模型,使用MATLAB統(tǒng)計(jì)和機(jī)器學(xué)習(xí)工具箱提供的incrementalOneClassSVM模型對(duì)動(dòng)態(tài)采集的數(shù)據(jù)進(jìn)行分析和異常檢測(cè)。
Mdl=incrementalOneClassSVM();
[Mdl,isAnom,scores]=fit(Mdl,Xtrain);
3、MATLAB低代碼工具幫助你快速開(kāi)始AI開(kāi)發(fā)
對(duì)于制造業(yè)的工程師和領(lǐng)域?qū)<襾?lái)說(shuō),在使用AI這種新型技術(shù)工具時(shí),并不希望有過(guò)高的門檻,例如人工智能背景知識(shí)、編程技能等。
MATLAB為領(lǐng)域?qū)<覀兲峁┝艘粋€(gè)端到端的低代碼開(kāi)發(fā)工作流程,從數(shù)據(jù)準(zhǔn)備、人工智能建模到系統(tǒng)仿真和部署。你可以快速開(kāi)始使用現(xiàn)成的人工智能算法,使用低代碼應(yīng)用程序標(biāo)記數(shù)據(jù),配置和訓(xùn)練人工智能模型。
根據(jù)數(shù)據(jù)和任務(wù)復(fù)雜度,可以在機(jī)器學(xué)習(xí)模型或深度神經(jīng)網(wǎng)絡(luò)之間選擇合適的方法,對(duì)于過(guò)程控制中所使用的結(jié)構(gòu)化數(shù)據(jù),機(jī)器學(xué)習(xí)方法能夠提供訓(xùn)練過(guò)程相對(duì)快捷且部署難度低的模型。
以機(jī)器學(xué)習(xí)為例,讓我們?cè)敿?xì)介紹一下工作流程和常用工具:
首先,我們需要將數(shù)據(jù)導(dǎo)入MATLAB工作區(qū),如果數(shù)據(jù)集太大無(wú)法直接導(dǎo)入內(nèi)存,可以使用數(shù)據(jù)存儲(chǔ)對(duì)象Datastore索引存儲(chǔ)在本地或遠(yuǎn)程文件系統(tǒng)中的數(shù)據(jù),并增量式地讀取數(shù)據(jù)片段。
在開(kāi)始構(gòu)建任何模型之前,很重要的一步是數(shù)據(jù)探查,了解數(shù)據(jù)結(jié)構(gòu)、對(duì)感興趣變量進(jìn)行可視化、查看數(shù)據(jù)分布,必要時(shí),清除缺失值或異常值,進(jìn)行標(biāo)準(zhǔn)化處理,在MATLAB中使用LiveTasks或dataCleaner應(yīng)用程序可交互式地執(zhí)行此步驟。
接下來(lái),提取并選擇合適的特征以供模型學(xué)習(xí)很重要,這取決于具體應(yīng)用,這一步驟可能需要圖像或信號(hào)處理技術(shù)以及統(tǒng)計(jì)分析等方法。
一旦數(shù)據(jù)集或特征準(zhǔn)備就緒,您就可以使用交互式應(yīng)用程序(如分類學(xué)習(xí)器或回歸學(xué)習(xí)器應(yīng)用程序)并行訓(xùn)練和比較模型。
為了更有效地建立模型,我們可以使用AutoML并結(jié)合小波散射來(lái)自動(dòng)提取性能特征,優(yōu)化超參數(shù)以選擇最佳模型。
最后,可以使用Simulink對(duì)模型進(jìn)行測(cè)試,并使用自動(dòng)代碼生成工具,將模型部署到目標(biāo)硬件。或者對(duì)于內(nèi)存或計(jì)算密集型模型,可以在云端訓(xùn)練模型并部署。
模型進(jìn)行測(cè)試")
作為這些工具的補(bǔ)充,MATLAB提供了更多其他交互式應(yīng)用程序。
例如,在數(shù)據(jù)準(zhǔn)備過(guò)程中,您可以使用不同的數(shù)據(jù)標(biāo)注應(yīng)用程序來(lái)處理不同類型的數(shù)據(jù),包括圖像、視頻、信號(hào)、點(diǎn)云等。
使用診斷特征設(shè)計(jì)器應(yīng)用程序,您可以提取統(tǒng)計(jì)和頻譜特征,并按照重要性對(duì)特征進(jìn)行排序。
進(jìn)入建模階段后,除了機(jī)器學(xué)習(xí)應(yīng)用程序,我們還可以使用深度網(wǎng)絡(luò)設(shè)計(jì)器構(gòu)建神經(jīng)網(wǎng)絡(luò),并使用實(shí)驗(yàn)管理器執(zhí)行超參數(shù)優(yōu)化。
此外,還有更多的領(lǐng)域應(yīng)用程序可供您探索和利用,以加快人工智能驅(qū)動(dòng)的系統(tǒng)設(shè)計(jì)。
交互式應(yīng)用程序可以簡(jiǎn)化工作流程,但算法或模型選擇可能需要反復(fù)迭代試錯(cuò)。
4、先進(jìn)過(guò)程控制與MPC
在分析了制造過(guò)程后,我們需要將觀察結(jié)果有效地反饋并控制生產(chǎn)過(guò)程,這至關(guān)重要。模型預(yù)測(cè)控制(MPC)是許多工業(yè)制造應(yīng)用中先進(jìn)過(guò)程控制(APC)的成熟技術(shù)。
連續(xù)反應(yīng)器動(dòng)力學(xué)在反應(yīng)堆溫度變化方面具有很強(qiáng)的非線性,并且在從一種操作條件過(guò)渡到另一種操作條件的過(guò)程中可能是開(kāi)環(huán)不穩(wěn)定的。在特定工作條件下設(shè)計(jì)的單個(gè)MPC控制器無(wú)法在寬工作范圍內(nèi)提供令人滿意的控制性能。
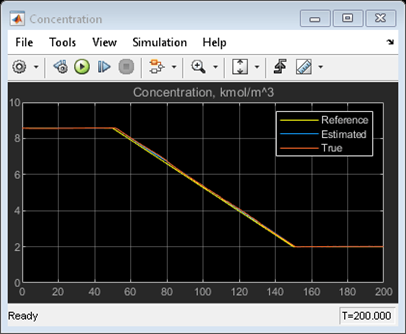
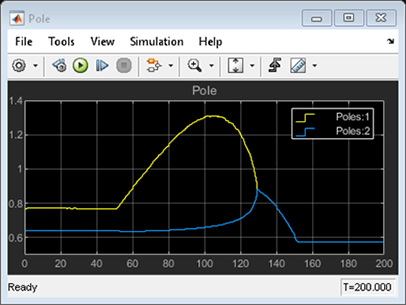
在Simulink中實(shí)現(xiàn)非線性連續(xù)攪拌釜式反應(yīng)器CSTR的自適應(yīng)MPC控制:
現(xiàn)非線性連續(xù)攪拌釜式反應(yīng)器CSTR的自適應(yīng)MPC控制")
控制器性能根據(jù)設(shè)定值跟蹤和干擾抑制進(jìn)行驗(yàn)證。反應(yīng)器濃度CA設(shè)定點(diǎn)從原始的8.57(低轉(zhuǎn)化率)過(guò)渡到2(高轉(zhuǎn)化率)kmol/m^3。在過(guò)渡過(guò)程中,反應(yīng)器首先變得不穩(wěn)定,然后再次穩(wěn)定(見(jiàn)上側(cè)極點(diǎn)圖)。
5、人工智能改進(jìn)MPC
MPC通過(guò)識(shí)別工廠的模型,以預(yù)測(cè)工廠的未來(lái)行為。它還結(jié)合了一個(gè)優(yōu)化器,確保預(yù)測(cè)的輸出跟蹤所需的參考。
MPC的一個(gè)顯著優(yōu)點(diǎn)是它能夠處理MIMO系統(tǒng)以及非線性系統(tǒng)。
人工智能也擅長(zhǎng)處理估計(jì)預(yù)測(cè)和非線性這兩個(gè)問(wèn)題,很自然地想要聯(lián)合使用AI和MPC以期望獲得更好的系統(tǒng)性能。
聯(lián)合使用MPC+人工智能有不同的方案。
一種方案是利用人工智能來(lái)擬合控制對(duì)象模型,如基于神經(jīng)網(wǎng)絡(luò)的狀態(tài)空間模型(NeuralStateSpaceModel)。該訓(xùn)練后的模型將用作MPC控制器內(nèi)的預(yù)測(cè)模型。

AI-based prediction model inside MPC
另一種方案,您可以通過(guò)訓(xùn)練強(qiáng)化學(xué)習(xí)智能體模仿非線性MPC控制器的行為,從而用智能體策略替代非線性MPC,降低部署到硬件的難度,同時(shí)提高計(jì)算效率。

Reinforcement learning agent imitate MPC
小結(jié)
制造業(yè)正朝著智能化、高端化、綠色化的方向轉(zhuǎn)型升級(jí),而人工智能是其中重要的科學(xué)技術(shù)生產(chǎn)力。利用MATLAB低代碼AI開(kāi)發(fā)平臺(tái),來(lái)自制造業(yè)一線的過(guò)程控制工程師和專家能夠更大的發(fā)揮其專業(yè)經(jīng)驗(yàn),更快更好地落地人工智能技術(shù),使得公司與員工和諧進(jìn)步。






