工業中普遍使用PID控制算法,其中90%是PI控制算法。因為自衡對象使用PI控制算法有一致、通解和任意三大特點,這三個特點的發現,標志著我們的Lambda工程整定方法研究基本收官:
1、一致
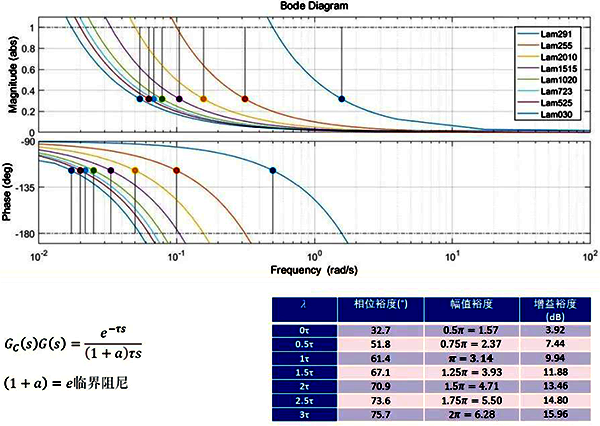
對一階純滯后對象。從τ/T=1/29、5/25、10/20、15/15、20/10、25/5、30/0(相當于0.035~∞)按一樣的整定規則,總有PI控制參數都能獲得一致的幅值裕度和相位裕度。PI控制器從時間常數主導到純滯后主導再到純純滯后都表現出了高度的一致性。穩定裕度也非常漂亮。上面的公式說明一階純滯后對象使用PI控制,在經過參數整定后的閉環性能只和純滯后時間、期望閉環時間常數相關。閉環性能和時間常數或者τ/T無關。不存在PI不適用于大純滯后的概念。閉環性能只和純滯后時間相關,當然純滯后主導后閉環性能會比開環慢。
2、通解
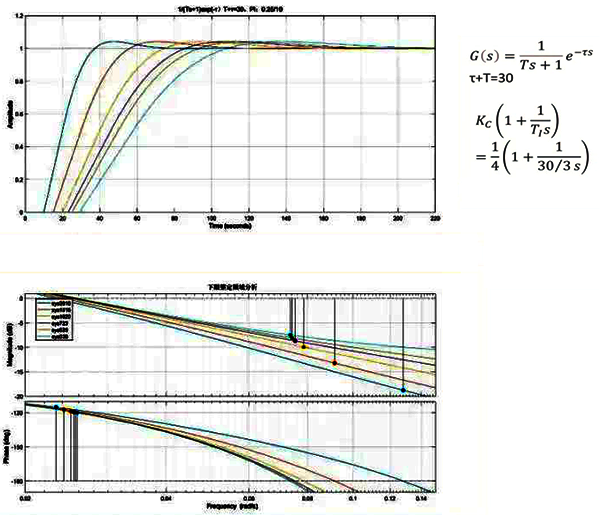
存在適用于所有自衡對象PI控制通解參數:比例增益1/(4K)和積分時間(τ+T)/3。這也意味著對自衡對象PI控制時應該存在最小的比例增益。1.如果比例增益小于1/(4K)系統還是振蕩,則肯定是積分作用太強引起的。2.如果比例增益大于1/(4K)系統振蕩,模型準確的話1/(4K)和(τ+T)/3就能控制住。這給流量控制的默認參數提供了依據。積分對象使用PI存在雙積分作用,通解不適用于積分對象。
3、任意
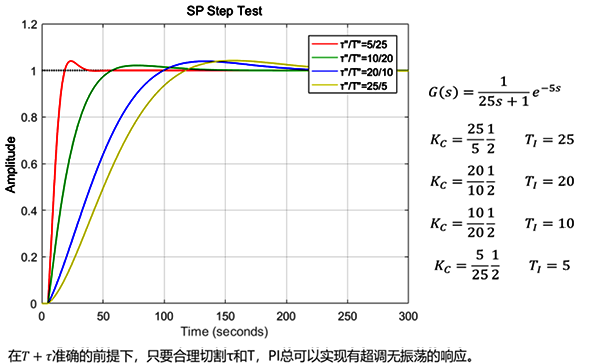
對于一個一階純滯后對象。如果T+τ確定。合理切割τ和T就能實現穩定控制。控制使用的等效純滯后選擇的原則是min{τ,(T+τ)*2/3},剩下的就是等效時間常數。這個說明PID整定并不需要知道被控對象的準確模型信息,當然了模型信息越準確閉環性能越好。這并不是否定響應曲線切線切割的重要性,等效純滯后估計的太小比例會引起振蕩,估計的太多往往會損失性能。任意的本質是在大時間常數輸出受限時實現有超調無振蕩,在純滯后主導時避免比例增益太小。
對Lambda整定方法的頻域分析發現了“一致”。對PID整定是不是基于模型的認識發現了“任意”。對純滯后主導小比例增益以及純純滯后純積分控制的性能損失發現了“通解”。
作者:馮少輝博士






