
將基準被控對象模型參數代入
公式得到比例增益Kc=0.5,由圖1可以發現其設定值階躍響應曲線還是有衰減振蕩,這說明上面的比例增益計算公式還是太強了。根據前面的試驗我們還知道設定值階躍響應振蕩和被控對象的純滯后時間直接相關。基于上面的考慮,自衡對象的純比例控制器整定公式更新為: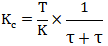
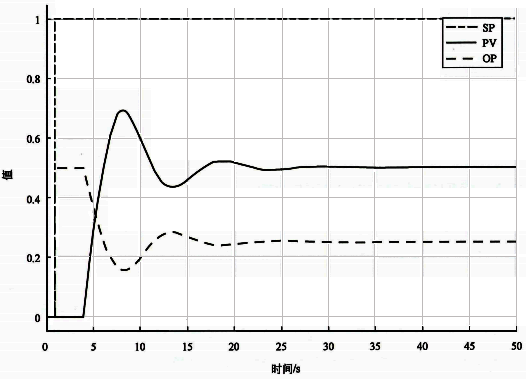
圖1 基準自衡對象Kc=0.5時設定值階躍響應
基準對象純滯后時間分別為0.75s、3s、12s時,使用上面的整定公式計算PID參數的設定值階躍響應曲線如圖2所示。τ/T從0.25增加到4,定值階躍響應曲線都表現為過程變量有超調無振蕩,這說明整定公式
比較合理。
圖2 不同τ基準自衡對象整定后設定值階躍響應






