
圖1 反向對象控制模型分析
τ=7.03-1≈6s
T=13.7-7.03≈6.7s

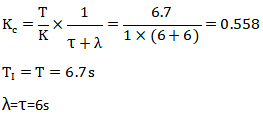
根據切線數據可以知道被控對象的PID控制模型:穩態系數,增益K=1;動態系數,時間常數T=6.7s;時間滯后,純滯后時間τ=6s。
PID控制器參數計算如下:
使用這組PID參數進行設定值階躍變化,閉環響應曲線如圖2所示。從設定值階躍響應曲線可以確定:Lambda整定方法只需要從響應曲線獲得一階純滯后控制模型參數就能準確得到最優的PID參數。

圖2 反向對象設定值階躍響應曲線
Lambda整定方法適用于欠阻尼、大純滯后、非最小相位等各類被控對象,可以作為PID參數整定標準化的基礎。






