可以通過選擇不同的PID配置和PID參數獲得控制性能提升,也可以通過前饋控制、串級控制甚至前饋串級組合控制獲得控制性能提升。通過控制結構改進獲得性能提升本質上與通過PID參數整定獲得性能提升是一致的。
所以就像PID參數整定一樣,每一個工程師都應該知道如何通過結構改進提升控制性能。這部分工作一般不需要在控制方案設計中考慮,或者在控制方案設計的最后階段才根據實際情況考慮。
串級控制是為了克服控制側干擾和非線性,但是串級模式反映了分層解決問題的思想,在控制方案設計中有更多應用。串級控制和串級模式解決的問題和適用場景并不意義。這一點以前也沒有被準確理解。
在控制方案設計中要遵循一些原則:
1、理解當前控制方案的設計意圖和操作思路,但是又不能拘泥于當前方案和當前解決問題的操作思路;
2、將復雜問題拆分或變通成單配對配對,按順序用單回路PID解決;
3、MV要從一而終,控制時不能切換控制權;
4、通過各種約束條件下模擬控制方案的動態處理過程,找到至簡至優方案。
分程控制是常用的復雜控制形式。本質上分程控制仍然是一個單回路PID,即便如此也要謹慎使用分程控制。當有1個CV2個MV時,當然可以使用MV合的方法選擇分程控制。但是要意識到也可以通過CV分的方法選擇不同設定值的分級控制或者閥位控制。
例如在用放空閥和補氮閥控制儲罐壓力時,MV合的分程控制往往是首選。其實不同設定值的兩個儲罐壓力控制回路,分別控制放空閥和補氮閥的CV分的分級控制,往往是更優選擇。兩個單回路可以獨立整定,壓力快速變化時防空閥和補氮閥同時開關的問題也很好解決。大小閥控制總流量選擇分程控制更是沒有理解設計意圖的錯誤設計。
超馳控制是為安全和異常工況準備的,如果超馳控制用于解決控制問題需要經常生效,往往是對超馳控制的不合理使用。超馳控制需要MV控制權切換所以在控制方案設計中應該謹慎使用。但是實際設計中很多看起來和安全有關所以選擇超馳控制。雖然超馳控制很少用但是濫用的情況也很普遍。簡單了不一定對,復雜了一定不對。分程控制+超馳控制一般情況下都有不夠至簡。
案例(來自《Process Control-Engineering Analyses and Best Practices》):一個水處理過程,水被送到FWKO罐,然后流到氣/液分離器,去除水中的夾帶氣體。然后水被送到下游進一步處理。流量由流量控制器調節。操作要求是通過操縱兩個流量控制閥來維持兩個液位。液位和流量測量可根據需要提供。對于FWKO罐,液位為控制變量,出口流量閥LCV-101為操縱變量。對于分離器,由于泵的非線性動力學,采用串級液位(LC-102)輸出流量(FC-101)控制回路來改進液位控制。
挑戰是分離器的容量比FWKO小得多。FWKO出口流量的波動很容易影響分離器液位控制器LC-102。在最初幾年的運行中,經常因為分離器高液位聯鎖導致停車。
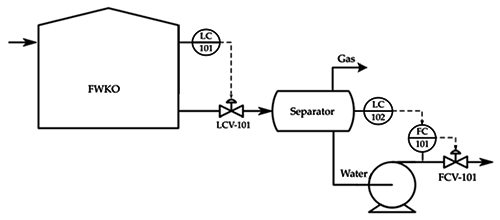
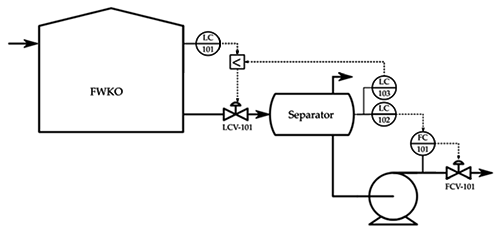
為了防止高液位聯鎖,分離器上的同一液位高液位控制器LC-103用于和FWKO罐液位控制器LC-101組成了超馳保護控制。但是超馳控制經常生效,LCV-101不能從一而終。所以這個方案能解決問題但是不夠至簡至優。
分離器液位控制由進口流量控制閥LCV-01控制,FWKO罐液位由泵排出處的控制閥(LCV-02)控制。這種嵌套控制方案是一種更清晰、更可靠的設計,提供了更好的總體性能。其實還有更簡單的處理辦法,解決控制問題并不一定要重新設計控制方案。
在牛紹華老師的大作《Process Control-Engineering Analyses and Best Practices》中,提出了控制方案故障排除的方法:對于任何控制回路,無論是簡單的獨立PID回路還是復雜的控制方案,無論是出于設計還是故障排除的目的,都可以詢問以下問題,以獲得有關該回路的必要知識。
1、地點WHERE:控制方案/回路位于哪里?
2、原因WHY:為什么需要控制方案/回路(工藝原因)?
3、功能WHAT:控制方案/回路應該提供什么功能?
4、時間WHEN:控制方案/回路何時響應?
5、實現HOW:控制方案/回路在DCS中是如何實現的?
6、異常WHAT IF:如果不滿足操作條件怎么辦?
故障排除應包括以下審查和分析,以理解和驗證控制策略:
①過程分析
②平衡分析
③因果分析
④自由度分析
⑤動態響應分析
⑥分層控制設計
作者:馮少輝博士






