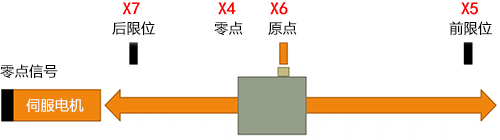
1、負正負回原點模式原理
“負正負”回原點模式,顧名思義,是指執行機構先向一個方向(通常是負方向,即遠離原點方向)移動一小段距離,然后迅速反轉方向(正方向,即朝向原點方向)。直至觸碰到原點限位開關,最后再反方向移動一小段距離以確認原點位置,最終停止于一個精確的位置。這種策略能夠有效避免因機械慣性、磨損或外界干擾導致的原點定位誤差。
2、負正負回原點模式實現步驟
①初始設定
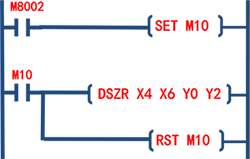
首先,在PLC程序中設置原點限位開關的輸入地址,并確定回原點過程中的移動速度和加速度參數。
②負向移動
向PLC發送指令,使執行機構以預定速度向負方向移動一小段預設距離。這個距離需要足夠遠,以確保能夠脫離任何可能的干擾區域,但又不能過長以免造成不必要的耗時和能耗。
③停止并反向
當執行機構移動到預定位置后,立即停止并反向移動,向正方向(原點方向)加速前進。
④檢測原點
持續監測原點限位開關的狀態。一旦開關被觸發,表明執行機構已接近原點位置。
⑤確認原點
為確保準確性,再次反向移動一小段距離(稱為“回退”),然后停止。這個回退動作可以幫助消除因觸碰限位開關時產生的微小過沖或抖動,提高原點定位的精度。
⑥定位完成
最終,執行機構停止在精確的原點位置,等待下一個控制指令。

3、負正負回原點模式優點與適應性
①通用性強
該模式不依賴于特定的PLC型號或伺服系統,只要具備基本的輸入輸出控制和運動控制功能,即可實現。
②靈活性高
通過調整移動速度、加速度和回退距離等參數,可以適應不同機器和工況的需求。
③可靠性強
通過負向預移和正向回退兩個動作,有效降低了因外界因素導致的原點定位誤差。
4、結論
這種負正負回原點模式雖然具有一定的通用性,但在實際應用中,還需要根據具體的設備型號和工藝要求進行調整。學習和掌握這種模式可以幫助電工更好地理解和應用PLC和伺服系統的控制。






