1、引言
火電機組輔機組故障減負荷(RUNBACK,簡稱RB),是針對機組主要輔機故障采取的控制措施,現代大型火電機組 RB過程一般通過DCS系統實現。RB過程要求過程參數不超過機組跳閘值、能將機組安全過渡到跳閘輔機允許的目標負荷范圍以內,過渡過程盡可能平穩,RB的成功對保證機組穩定可靠運行具有重要的意義。
RB過程中燃料流量和給水流量動、靜態是否匹配,是RB過程是否成功的標志之一;RB過程中,燃料流量迅速減少,與之配合的給水流量控制是否能夠穩定可靠,是RB是否成功的關鍵。
目前,各試驗研究部門、發電企業從輔機跳閘后如何保證機組不停機、不停爐的角度對機組RB功能及相關鍋爐控制方面進行了大量的仿真和試驗研究。對600MW機組給水泵RB試驗過程進行了詳盡的分析,對機組全協調RB狀態下控制策略進行了優化和探討。
本文針對1000MW超超臨界機組,對發生輔機故障減負荷時的鍋爐給水控制進行分析,提出采用前饋+PID的方法對鍋爐給水流量回路進行調節的新型控制策略,給出前饋信號在給水泵投入臺數發生變化時的無擾處理方法。海門電廠1000MW超超臨界機組RB試驗結果表明,本文提出的RB過程給水流量控制策略對給水的控制穩定、準確,對其他同類機組RB過程實施時給水流量的控制具有一定的參考價值。
2、給水流量控制原理
2.1 鍋爐給水指令生成
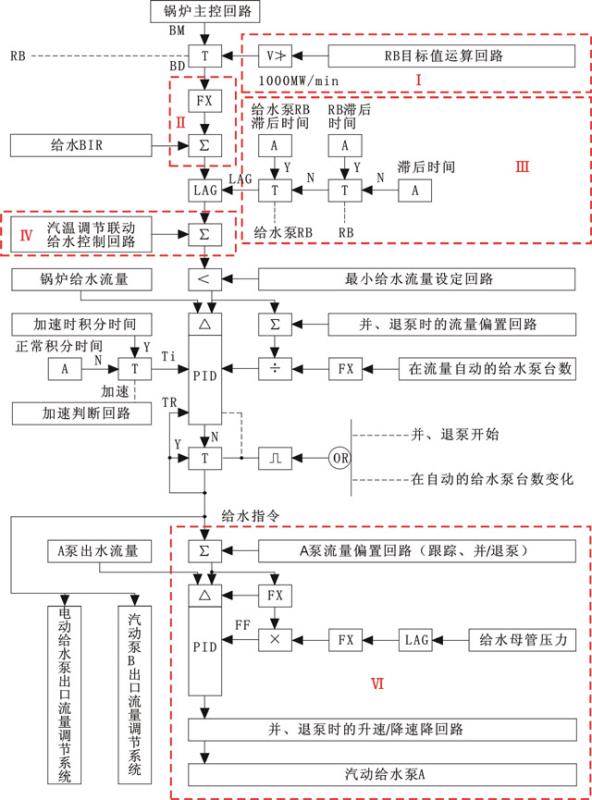
如圖1所示,鍋爐主指BD經過一個曲線函數FX后,形成了與鍋爐負荷靜態匹配的給水指令,稱為給水指令的靜態部分。機組變負荷過程中,靜態給水指令疊加上CCS系統發出的加速給水BIR信號后,形成總的給水指令,如圖1中的Ⅱ部分所示。為了協調燃料、給水系統之間不同的時間特性,總的給水指令增加慣性環節LAG后,再經過一個最小流量值限制后,最終形成給水流量設定信號。協調燃料、給水時間特性的LAG的慣性時間根據機組升/降負荷過程、RB過程自動進行修改,以適應機組不同工況過程的時間協調如圖1中的Ⅲ部分所示。在鍋爐進入直流方式后,給水控制還需要兼顧主汽溫調節和中間點溫度的調節任務,為此設計有汽溫調節聯動給水控制的回路,如圖1中的Ⅳ部分所示,汽溫聯動給水回路根據中間點溫度和噴水減溫的情況,動態地輸出給水指令校正信號,控制給水與減溫調節相互協調。鍋爐給水BIR、汽溫調節聯動給水輸出的校正信號,稱為給水指令的動態部分。
2.2 給水主控
給水主控完成鍋爐給水流量的調節,如圖1中的Ⅴ部分所示。
2.2.1 前饋+PID的結構
鍋爐給水流量控制對象本身是快速響應的,時間常數小,但由于控制系統環節較多,經過鍋爐給水流量調節回路、給水泵出口流量調節回路、MEH轉速調節回路,再加上控制系統的延遲,造成整個給水流量調節存在純遲延環節,如果控制參數調整不好,易造成系統的不穩定,甚至引發給水流量的發散性振蕩、給水泵搶水、鍋爐MFT等事故[2]。采用設定值前饋的方法,能夠提高閉環系統的穩定裕度,可以有效解決該問題。
圖1中的Ⅴ部分中,給水流量設定值經過給水泵投入臺數校正后,送到PID的前饋輸入端FF,給水主控成為一個前饋+PID結構。
2.2.2 前饋信號的無擾處理
給水主控的輸出就是各臺給水泵出口流量指令,在不同數量的給水泵自動是不同的。單臺泵自動時,給水主控輸出的變化量與鍋爐給水流量的變化量是相等的;兩臺泵自動時,給水主控的輸出時送到兩臺給水泵,給水主控輸出的變化量只需達到鍋爐給水流量需求變化量的一半即可;兩臺泵自動情況也相似。因此,不同數量的給水泵自動時,前饋量是不同的,必須對前饋信號進行增益自動校正,而這種校正對于前饋信號來說是一種擾動。
在給水泵投入/退出自動時,前饋量都會發生突然的變化,對系統造成擾動,本文提出了采用PID暫時保持的方法,利用PID內部的跟蹤運算,實現了前饋信號的無擾處理。如圖1的Ⅴ,當前饋信號需要發生突變時,都會產生一個0.2秒脈沖信號(兩個運算周期),使PID跟蹤保持0.2秒的時間,在這0.2秒時間內,完成前饋增益的校正,之后回到正常的PID運算。采用此種控制策略后,雖然前饋信號發生了突變,但給水主控的輸出是保持不變的,這種處理只需要2個運算周期的時間,對系統調節不會有任何影響。
2.2.3 給水流量調節的加速
給水流量調節采用變積分參數Ti的方式,實現各種工況下的給水調節速率,正常調節時,采用一個正常Ti參數,當需要加快調節速率時,采用一個較小的Ti參數。主要包括:
(1)在并泵、退泵過程中,需要快速消除給水流量控制偏差;
(2)發生給水泵跳閘RB時,需要迅速增加給水主控的輸出;
(3)給水流量控制偏差大,需要快速消偏差時。為了控制的穩定,必須在各臺給水泵出口流量控制跟蹤得上的情況下,給水主控的加速才能起作用。
2.2.4 并、退泵時的流量偏置前饋
給水泵自動并入、退出時,設計有一個流量平衡回路。當有給水泵需要并入時,并入的給水泵出口流量由0t/h開始增加,同時其它給水泵則相應地減少出口流量,維持總的鍋爐給水流量不變。給水泵并、退時,給水主控的輸出會根據并/退的泵的出口流量變化相應地改變,該過程由前饋來實現,如圖1中的Ⅴ部分所示。
2.3 給水泵出口流量調節
通常給水主控的輸出為各臺泵的轉速指令直接送到MEH系統,這種設計少串了一個給水泵出口流量調節回路,結構簡單。但由于各泵出水流量不相等,容易造成各臺泵出力不平衡,不利于全程自動的實現。因此,各臺給水泵設計一個出口流量調節回路,如圖1中的Ⅵ部分所示。
2.3.1 前饋+PID的結構
與給水主控相似,給水泵出口流量控制也采用前饋+PID的結構,以實現整個給水控制的穩定。泵出口流量與轉速的對應關系由一個曲線函數FX來實現,并用給水母管壓力進行修正。
2.3.2 給水泵出口流量信號計算
給水泵工藝上并沒有設計有泵出口流量信號的測點,只設計有泵入口流量,為此,需要通過計算得到泵出口流量信號,由泵入口流量、再循環門開度、和給水泵出口壓力和除氧器壓力等信號計算,從而得到給水泵出口流量信號,用于給水泵出口流量調節。
2.3.3 流量偏置回路
設計有一個給水泵出口流量設定值偏置回路,給水泵在手動方式時,設定值偏置自動跟蹤,實現泵出口流量設定值的跟蹤。在進行并、退泵控制時,也是通過改變設定值偏置來增大、減小泵的出口流量,同時這個流量偏置也送到給水主控,實現其它泵的協同動作,給水流量無擾切換。
2.3.4 并/退泵時的升/降速回路
設計有并/退泵時的升/降速回路,實現并/退泵過程的升速/降速控制。如進行并泵控制時,需要先提升該泵的轉速,等該泵有出水并且出水量達到一定的穩定值(如100t/h),再進入流量平衡控制;退泵過程時,由流量平衡回路將該泵降到沒有出水后,一般泵的轉速還比較高,需要由降速回路將該泵降到最低轉速,再進行解列。
3、RB過程給水流量控制
RB過程中,給水流量是迅速減小的,這個過程給水流量控制必須緊跟設定值變化,否則會引起給水流量的較大擾動,當各泵的再循環門開啟時間不同步時,容易造成給水泵搶水,引發機組停機事故。因此,必須重視RB過程的給水流量控制。
3.1 非給水泵RB過程
發生不是由于給水泵跳閘的RB過程,如送、引風RB、一次風RB等過程時。鍋爐指令BD以1000MW/min的速率迅速減小,磨煤機也按相應的順序快速跳閘,鍋爐燃料量迅速減小,此時需要給水流量也需要相應地迅速減少,以實現與燃料的匹配。協調給水與燃料特性的滯后時間LAG也要相應地減少,具體LAG時間值可以通過磨煤機RB試驗來確定。
進行磨煤機RB試驗,模擬其它條件的RB過程的跳磨順序和間隔,手動打閘磨煤機,若RB過程中汽溫穩定、中間點溫度穩定,則LAG合適,否則需要調整LAG時間。一般LAG時間在正常時的1/10~1/5之間合適,過小的LAG時間,給水指令的快速變化,相當于一個大的設定值階躍擾動,有可能會對給水系統造成較大的擾動。RB過程中,由于主汽壓力的迅速降低,給水流量調節特性發生較大的變化,增加了不穩定的因素。給水主控和泵出口流量均采用前饋+PID的結構,能增加系統的穩定性。在給水泵再循環控制策略上,應考慮到各臺泵再循門打開起始時間不同步的情況,此時極易引起給水泵搶水,再循環的控制策略應有在給水泵發生搶水后的自動安全恢復功能,保證不會發生MFT事故。
3.2 給水泵RB過程
兩臺給水泵并列運行,一臺給水泵跳閘后,實際給水流量會瞬間減少將近一半。由給水主控原理可以知道,給水主控的輸出并不會發生變化,此時在運行的給水泵若不在最高轉速下運行,則需要迅速提高給水主控的輸出,提高鍋爐給水流量。可以采用超馳控制方法,迅速提升運行泵到最高轉速值。
由于實際給水流量已經瞬間減少了一半,協調給水與燃料特性的滯后時間LAG只需要穩定運行泵在最高轉速運行即可,因此,LAG盡可能在大些,否則在給水指令的迅速下降過程中,由于前饋的作用,反而會降低給水泵的轉速。
4、RB試驗過程給水流量控制過程分
給水泵出口流量前饋量設為0,并將給水主控的加速回路去除,進行一次磨煤機RB試驗,RB過程給水控制如圖2所示,RB發生后,給水流量指令迅速下降,實際給水流量下降則非常緩慢,跟蹤不上,造成較大的偏差。給水主控輸出則降低很多,但A、B泵兩泵的出口流量下降非常緩慢,也跟蹤不上,存在較大的偏差。到后來,隨著主汽壓力的下降,A、B泵兩泵的出口流量迅速下降,A泵出口流量下降到再循環門打開,B泵搶水,A泵出口流量瞬間降為0t/h,在A泵出口流量調節的作用下,A泵迅速提升轉速,A泵出水流量迅速提升,在再循環門的配合下,A泵并列成功。恢復給水泵出口流量前饋,再次進行RB試驗,RB過程給水控制如圖3所示,在前饋的作用下,給水流量控制過程平穩,沒有發生波動的現象。可見,前饋+PID的結構能立即提升系統的穩定性。
一次給水泵B跳閘的RB過程如圖4所示,給水泵B跳閘后,在給水主控的加速回路作用下,A泵迅速提升到最高轉速,待給水流量指令下降到與實際給水流量相等時,給水流量隨即跟隨設定值,整個過程給水流量控制穩定,各項參數過渡平穩。
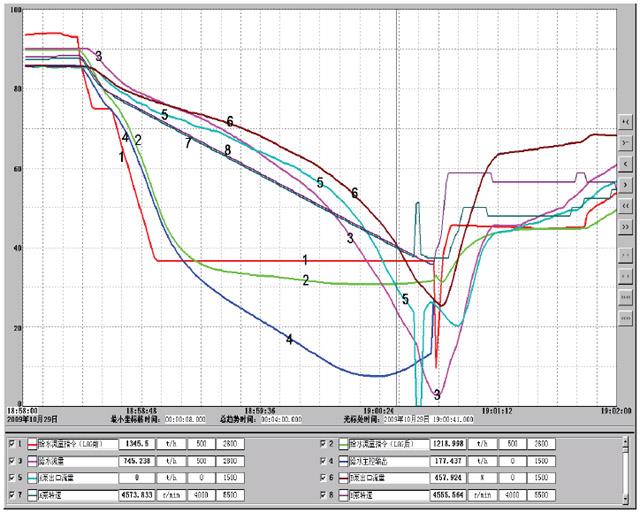
圖2 給水泵出口流量調節不設前饋時RB過程
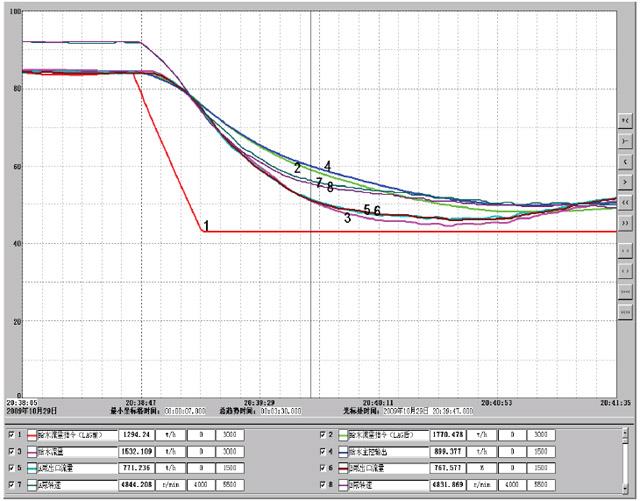
圖3 給水泵出口流量調節設前饋時RB過程
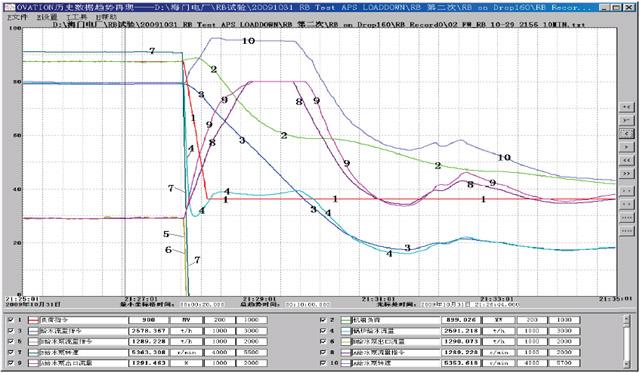
圖4 給水泵B跳閘時RB過程
5、結語
RB過程中燃料量和給水流量動、靜態匹配,給水流量控制是否能夠穩定可靠,成為RB是否成功的關鍵之一。本文針對1000MW超超臨界機組,對發生輔機故障減負荷時的鍋爐給水控制進行分析,討論的采用前饋的控制策略來實現鍋爐給水流量控制,通過增加系統的穩定裕度,保證了給水流量控制的穩定,給出前饋信號在給水泵投入臺數發生變化時的無擾處理方法。海門電廠1000MW超超臨界機組RB試驗結果表明,本文提出的RB過程給水流量控制策略對給水的控制穩定、準確,對其他同類機組RB過程實施時給水流量的控制具有一定的參考價值。






